十年磨一劍造出機器人“柔性手臂”
副標題:
來源:中國青年報 | 2021-04-23 11:13:02
中國青年報 | 2021-04-23 11:13:02
原標題:
正在加載

中國科大研發的“可佳”智慧服務機器人 受訪者供圖
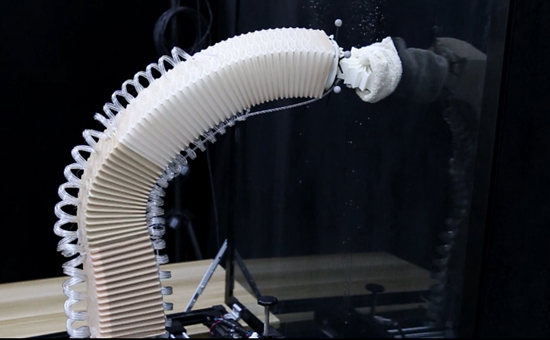
圖為軟體手臂在執行擦玻璃指令 受訪者供圖

中國科大團隊帶“可佳”機器人參加機器人世界盃比賽 受訪者供圖
讓機器人打開一扇門有多難?
歷經十餘年探索,中國科大自主研發的低成本軟體機器人手臂,可以輕鬆完成生活中的開門、擰瓶蓋、擦玻璃等操縱任務。
該校計算機學院教授、機器人實驗室主任陳小平團隊的最新研究進展發表在最新一期的機器人頂刊《機器人研究國際雜誌》上,展示了軟體機器人手臂在日常生活中的巨大應用潛力,論證了這些年科研成果的可行性。
傳統機器人大多是剛性機器人,基於關節-連桿結構,自上世紀60年代起,在傳統製造業大規模應用。近10年來,智慧製造、家政服務、農業作業、救援、安防等市場需求增加,軟體機器人研究成為機器人源頭技術競爭的戰略制高點。
陳小平長期從事人工智慧與機器人的交叉研究和教學。2010年,陳小平團隊瞄準産業前景,嘗試將柔性材料應用在機器人的骨骼和肌肉中。“近年來,我們團隊堅持自己的科學原理和創新步伐,力爭為中國拼下更多原始創新成果。”他感慨道。
軟體動物、蜂巢帶來啟發
“以傳統工業機器人為代表的剛性機器人受制于負重比低、柔順性差等先天局限,難以充分滿足人機共存環境和人機協作任務等新型應用的需求。”陳小平舉例,讓剛性機器人執行開門任務並不簡單,需要精確的感知、建模、規劃、控制。任何一環出錯都不行。
2013年,陳小平團隊提出了“氣動蜂巢網絡”,這是一種天然的剛柔合一結構,兼具大形變性、高靈活度、高負重比和低成本等特性。類似于既柔順靈活又很有力氣的軟體動物。
在上述論文中,陳小平團隊闡釋了軟體機器人手臂的本質柔順性和連續變形特性,展示出一種全新的機器人與環境交互的方式。
論文第一作者、實驗室軟機器人組博士研究生薑皓介紹,軟手臂在和環境交互的時候,不需要提前對環境進行精確建模,即使在執行任務過程中被人為“搗亂”也不影響完成任務。“我們製備了像象鼻一樣兼具靈活度和大負載能力的軟體手臂,手臂負載自重比達1:1。”
“蜂巢氣動網絡結構是蜂巢和氣囊的結合,當氣囊充氣時,依靠蜂巢的結構形變,産生不同方向的彎曲或伸長運動。”軟機器人組博士研究生王展翅説,蜂巢氣動網絡結構,其變形是由構成蜂巢的六邊形的折疊、伸展造成的,兼具靈活性,製備簡單、耐用。
堅持原始創新,讓機器人做擅長的事
陳小平至今記得,1999年,在瑞典斯德哥爾摩舉辦的世界人工智慧聯合大會上,他的論文是中國大陸唯一的入選論文。
他站在臺上分享自己關於“人和機器人交互意圖邏輯”主題的想法時,底下坐滿了外國學者。通過交流,他對人工智慧、機器人科研獲得新理解。
“國際一流研究團隊的論文看起來只在談理論,其實背後往往有很深的應用背景。”那段時間,陳小平反思,研究人工智慧,要從重大應用需求中提煉科研目標,不然“心裏沒底”。
1998年,陳小平開始組建中科大機器人團隊,通過參加科研性質的機器人比賽培養鍛鍊隊伍。2007年,團隊在美國亞特蘭大獲得機器人世界盃總分第一。
2008年,陳小平選擇家庭服務機器人為長期研究目標,進入自主創新階段。最初,團隊在機器人移動底盤上加裝了一款進口的機械手臂,但發現手臂太短,且存在安全性、靈活性不足等問題。
團隊嘗試自己做一款手臂。他們研發了一款剛性機械臂,每個關節上有一套電機、減速器、控制器。但重量和成本都很高,一台機器人成本至少30萬元。
“我們決定研發一種更靈活、更安全、更輕的柔性手臂。”陳小平回憶,當時論文和書本裏都找不到相關案例,只能從零開始。
經過無數次嘗試,2013年,他們終於發現氣動蜂巢結構可以滿足相關特性。但這種結構在現實世界中並不存在,只能自己手工製作。最初,團隊造出的手臂十分簡陋,只能“動一動”,沒法完成更複雜的動作。
2014年,陳小平擴大了實驗室軟體機器人組規模,團隊成員不斷改進控制算法,相繼攻克手臂抖動等技術難題。
2016年,團隊研發的氣動蜂巢網絡軟體執行器可實現三維空間內對不規則物體的操縱。2017年,陳小平在團隊增設柔性手爪研究組,自主研發了剛柔合一的機器人柔性手爪,可抓握多種形狀、尺寸和材質的物體,突破了剛性手爪的局限性。
據悉,服務機器人技術在智慧製造、醫療康復,家庭服務等領域有巨大研究價值和廣泛應用前景。比如,讓機器人為不同形狀的産品進行表面打磨;對高鐵、動車、地鐵車廂進行無死角噴塗;或是給臥床的老人喂飯。
在陳小平看來,團隊已掌握了一類軟體機器人科學原理的“秘籍”,但技術應用是一大挑戰。“很多企業希望‘買來産品就能用’。但大學有自己的科研使命,更應該聚焦原始創新和關鍵技術研發,而不是具體産品研發。”
“因此,科研道路上,克服了原理和技術難題,就要找到發揮技術優勢的應用場景,打造實用化的科技研發,這是團隊未來的一項重要任務。”陳小平説。
希望更多青年學生愛上機器人研發
這支近40人的科研團隊,除了老師外,目前都是90後研究生和本科生,在人才培養上,有何成功之道?
在陳小平團隊裏,老師們有一個共識:科研是長期探索的過程,老師設計好科研和課題方向,指導學生按照興趣和科研需要組建團隊,引導學生做有價值的研究。
陳小平也一直倡導讓學生大膽提出想法,並通過實踐加以檢驗。“哪怕我覺得學生想法不通,或者我已經有了解決方法,但只要科研時間進度允許,我不會直接告訴學生答案。讓學生自己找到道路,幫助學生犯錯誤,這樣才能鍛鍊他們的創造力。”
這些年來,團隊許多懷抱科研夢想的年輕人得到快速成長。
在2014年的第18屆RoboCup機器人世界盃比賽中,陳小平團隊自主研發的“可佳”智慧服務機器人奪冠。這標誌著我國服務機器人研發取得歷史性突破。
在這次比賽中,剛讀研一的王寧揚負責硬體的拆卸、裝配和維護等,為奪冠立下大功。
王寧揚于2009年考入中國科大,出於對機器人的興趣,大一就參加了學校“RoboGame機器人活動周”比賽。這也進一步激發了王寧揚的熱情,他申請加入陳小平團隊的實驗室。
在中國科大,機器人不僅作為一項前沿科學研究,同時也是人才培養的重要手段。陳小平所負責的機器人實驗室從20世紀90年代就開始選拔人才,他們還面向本科生開設“機器人研討班”課程。課程結束後,有興趣的同學可以申請進入實驗室學習,很多同學很快獨當一面。
這兩年,在機器人實驗室裏,00後的身影逐漸增多。陳小平很欣慰,他覺得,當更多青年學生愛上機器人研發,一定會給機器人産業創新積蓄更多活力。
熱點推薦
手機看
掃一掃 手機繼續看
A-
A+